Otonom Uçuşta Devrim:
NexusV3 Uçuş Kontrolcüsü
GNSS-Bağımsız Ortamlarda Eşsiz Performans.
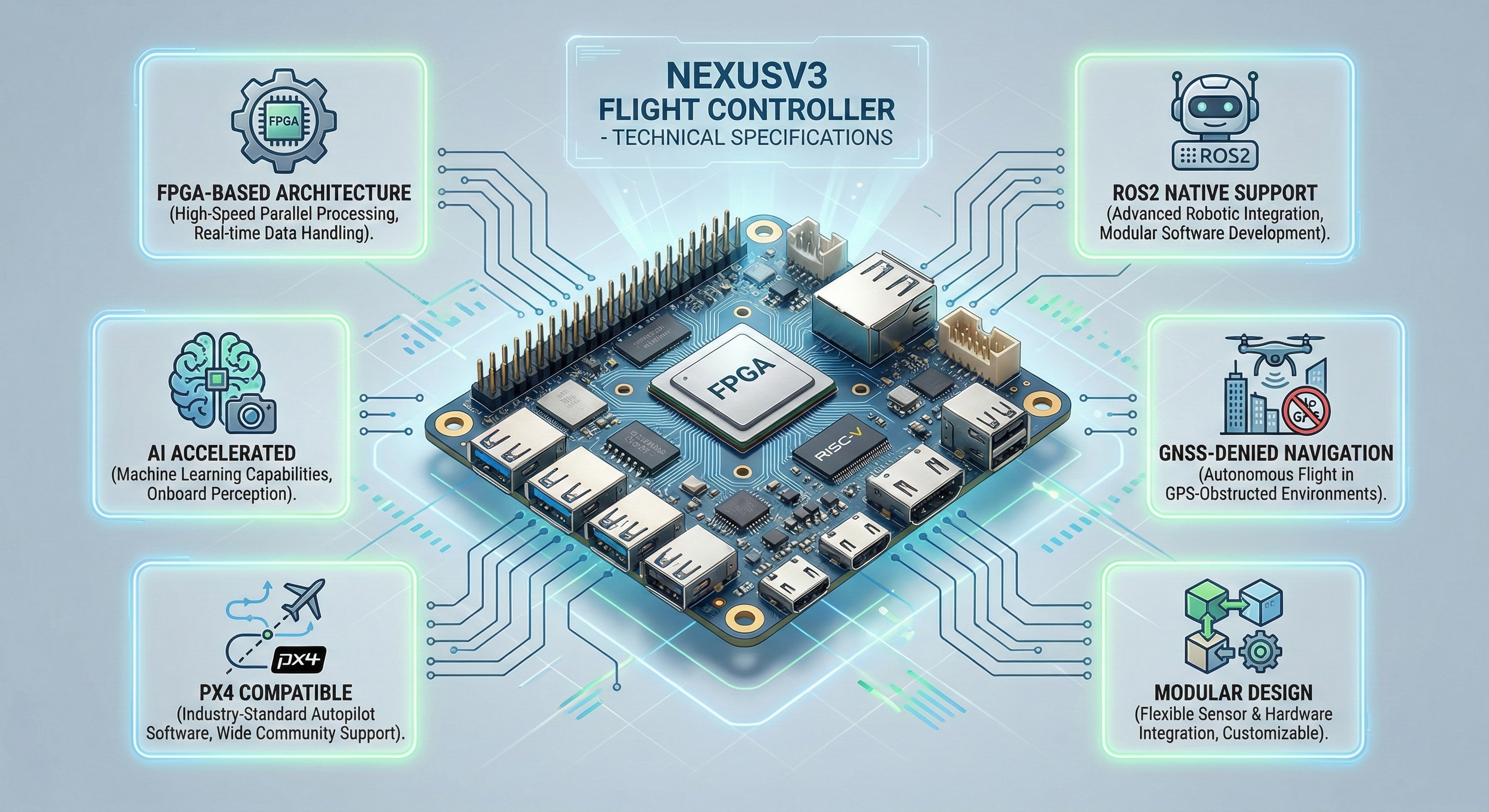
FPGA TABANLI MİMARİ
Yüksek Hızlı Paralel İşleme, Gerçek Zamanlı Veri İşleme.
YAPAY ZEKA HIZLANDIRMALI
Yerleşik Makine Öğrenmesi ve Algılama.
GNSS-BAĞIMSIZ NAVİGASYON
GPS Devre Dışı Kaldığında Gerçek Otonomi.
ROS2 YEREL DESTEK
Gelişmiş Robotik Entegrasyon.
PX4 UYUMLU
Endüstri Standardı Otopilot Yazılımı.
MODÜLER TASARIM
Esnek ve Özelleştirilebilir.